GPS测量定位涉及很复杂的数学计算,而这些计算都由专门的软件来处理,所以面对非测绘专业的读者,以下只列出简单的原理公式。
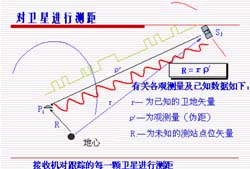
利用三个以上卫星的已知空间位置,用空间距离交会法,求得地面待定点(接收机)的位置,这就是GPS卫星定位的基本原理但考虑到各种误差的影响,为了达到定位精度要求,至少需要同步观测4颗以上的卫星。
卫星是高速运行的动态已知点,卫星的实时位置是由导航电文解算的,只要实时测量出测站(接受机天线中心)至卫星间的距离,就可以进行测站点的定位。公式如下:
式中(xJ,yJ,zJ)为三个卫星某时刻的位置(j=1,2,3);
依据测距原理,其定位方法可分为:伪距法定位、载波相位定位和差分定位等。根据待定点运动状态可分为静态定位和动态定位。
单机定位又叫绝对定位,若至少两台以上接收机同时观测,确定两点间相对位置,又叫相对定位。
伪距测量通常用C/A码或P码进行,在图2-24中,卫星到接收机的距离是通过测定信号从卫星到接收机的延迟时间乘以光速C来求得,延迟时间是通过码相关技术来求得。
GPS卫星发射的测距码是按一定的规律排列的,在同一周期内每个码对应着某一特定的时间,识别每个码的形状特征,即用每个码的某一标志可推算时延值τ,由于τ及各种误差的影响,实际测得的距离ρ′与卫星到接收机天线的几何距离ρ有一定差值Δρ,所以ρ′称为伪距:
考虑到卫星钟差C?δtk,接收机钟差C?δtj,电离层延迟δp1,大气对流层延迟δp2,则
一台静止的接收机用伪距测量方法同步观测四颗以上GPS卫星,分别得到伪距观测量ρj′(j=1,2,3,4……) 因此2-7式可写成:
2-9式即为伪距定位的观测方程组。将上式线性化,并按最小二乘平差解此方程组,即可求得定位点坐标(xP,yP,zP)。
载波相位观测通过测定GPS接收机本振参考信号与卫星载波信号的相位差,间接测定卫星到接收机天线间几何距离。由于载波波长比C/A码的码长短,λL1=19cm,λL2=24cm,所以可达到很高的精度。
如图2-26,以φjk(tk)表示K接收机在接收机钟面时刻tk所接收到的j卫星载波信号的相位值,φk(tk)表示K接收机在钟面时刻tk所产生的本地参考信号的相位值,则K接收机在接收机钟面时刻tk时观测j卫星所取得的相位观测量可写为
 。
。
通常的相位或相位差测量只是测出一周以内的相位值,实际测量中,如果对整周进行计数,则自某一初始取样时刻(t0)以后就可以取得连续的相位测量值。
在初始t0时刻,测得小于一周的相位差为△φ0,其整周数为N0J,此时包含整周数的相位观测值应为:

接收机继续跟踪卫星信号,不断测定小于一周的相位差△φ(t),并利用整波计数器记录从t0到t1时间内的整周数变化量Int(φ),只要卫星Sj从t0到t1之间卫星信号没有中断,则初始时刻整周模糊度N0j就为一常数,这样,任一时刻t1卫星Sj到K接收机的相位观测值为:
一台静止的接收机用载波相位测量方法同步观测四颗以上GPS卫星,分别得到(2-10)式相位观测值,并考虑到各种误差的影响,同样可列出载波相位测量的观测方程式,并按最小二乘平差求解,即可求得定位点坐标(xP,yP,zP)。
①整周模糊度N0是未知的量,如何确定?很多学者提出了解算的方法,如伪距法、三差法、快速确定法以及把N0作未知数参加平差(整数解、实数解)等方法,并由软件来解决此问题。
②接收机在信号跟踪接收过程出现信号中断使计数器无法连续计数,即出现整周跳变,如何修复周跳,确定Int(φ)的正确数据?常用多项式拟合法,卫星间求差法以及根据平差后残差发现和修复整周跳变。
静态相对定位是用两台接收机分别安置在基线两端,同步观测相同的GPS卫星,以确定基线端点的相对位置或基线向量。同样,多台接收机安置在若干条基线的两端,通过同步观测GPS卫星可以确定多条基线向量。在一个端点坐标已知的情况下,可以用基线向量求另一待定点坐标。相对定位的主要原理是,在两个或两个以上观测站同步观测相同卫星的情况下,卫星的轨道误差、卫星钟差、接收机钟差以及电离层和对流层的折射误差对观测量的影响具有一定的相关性,利用观测量求差的办法可有效地消除或减弱相关误差影响,以提高定位精度。
如图2-27,两个测站同步观测两个卫星,在ti时刻,测站1和2对K卫星和J卫星的载波相位观测值为:
 。
。
则得接收机(站)间对K卫星和J卫星第一次求差(单差):
(同样也可进行i+1时刻对k、j卫星进行站间求单差和双差)
在此基础上,还可以在不同历元(i与i+1时刻)间进行三次求差(三差):
上述差分观测量能有效地消除各种偏差,单差观测值中可以消除与卫星有关的载波相位及钟差项,双差观测值中可消除与接收机有关的载波相位及钟差项,三差观测值中可消除与接收机有关的初始整周模糊度项N0。
这里介绍的差分定位,是将一台GPS接收机安置在参考站(基准站)上进行观测,基准站将已知的测站精密坐标和接收到的卫星信息直接或经过处理后实时发送给流动站接收机(待定点),流动站接收机在进行GPS观测的同时,也接收到基准站的信息,经过对结果进行改正,从而提高定位精度。
单基准站的差分按基准站发送信息方
式来分,可分为位置差分,伪距差分
和相位差分。
设基准站精密坐标已知为(X0,Y0,Z0),在基准站上由GPS测得的坐标为(包含各种误差),则改正数为:
流动站接收机自身观测得到待定点坐标(XP´,YP´,ZP´)(包含误差),接收机接收到改正信息后加上上述位置改正数,并顾及接收机改正的瞬时变化,则待定点坐标为:
这种方法计算简单,适用于各种型号的GPS接收机,但基准站与流动站必须接收同一组卫星,当基准站与流动站距离较远时难以做到。
与上述不同的是,基准站发出的改正数是基准站至各颗卫星间的伪距改正数:
其中xj,yj,zj为卫星坐标,d?t为钟差,v1为接收机嗓声。
这种差分实际应用较广,基准站提供所有卫星的改正数,流动站接收机只要任意观测4颗以上卫星就可以定位,但其精度仍随基准站与流动站接收机的距离增大而降低。
载波相位差分技术又称RTK(Real Time Kinematie)技术,是实时处理两个测站载波相位观测量的差分方法。相位差分又分两种:一类是修正法,基准站将载波相位修正值发送给流动站,改正流动站接收到的相位,再解求坐标,这种方法称为准RTK;另一类是差分法,即将基准站采集的载波相位发送给流动站,进行求差解算坐标,称为真正RTK(图2-29)。同样可写出载波相位观测量形式的求解的方程式:
式中 以Njp0表示流动站接收机起始相位模糊度,Nj0为基准站接收机起始相位模糊度,Njp,为流动站接收机起始历元至观测历元相位整周数,Nj为基准站接收机起始历元至观测历元相位整周数为流动站接收机测量相位的小数部分,为基准站接收机测量相位的小数部分,为同一观测历元各项残差,其他符号同前。
RTK技术精度高,用途广,用于工程测量、海上精密定位,地形测图,地籍测量等十分方便,但使用双频接收机,造价十分昂贵。
这种差分 GPS定位系统,简称为DGPS。
在局部区域范围内,布设若干个基准站(可包括部分监测站),与一个或多个流动站组成差分GPS网,流动站根据多个基准站所提供的改正信息,经平差后求出自己的改正数,从而提高了定位精度。这种多个基准站的局部区域差分 GPS定位系统,简称为LADGPS。
这种差分定位系统的每个基准站都通过无线电发送改正信息,流动站与基准站之间的距离在500KM以内可获得较好的精度。
 这种系统的特点是:用户不设基准站,只要向主控站提出申请即可,定位精度高,而且精度均匀。
这种系统的特点是:用户不设基准站,只要向主控站提出申请即可,定位精度高,而且精度均匀。
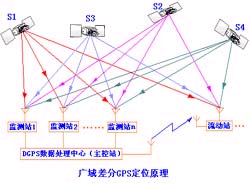
3)虚拟基准站 在较大区域,设若干个监测站(已知点),对卫星进行跟踪观测,同时把观测结果全部传输到数据处理中心(主控站),主控站计算出星历误差、电离层延时和对流层延时及卫星钟差的改正模型,并把这些改正信息发送给用户接收机(流动站),流动站根据接收到的GPS信号和改正信息,计算出自己的精确位置。这种广域差分GPS定位系统,简称为WADGPS(图 2-30)。
在一定范围内,建立一个基准网络控制中心,设若干个基准站和若干个动态接收机,这些基准站接收机可与手机连接,向基准网络控制中心发送载波相位观测数据,基准网络控制中心根据动态用户的实时请求和发来的单点定位三维坐标,选择来自基准站而经过优化组合的载波相位测量的DGPS数据,将其发送到该流动站接收机,进而改正它的观测成果,从而实现精密定位的目的。这种DGPS数据,好象来自流动站接收机附近的一个“虚拟” 基准站,而具有高精度的改正能力。


