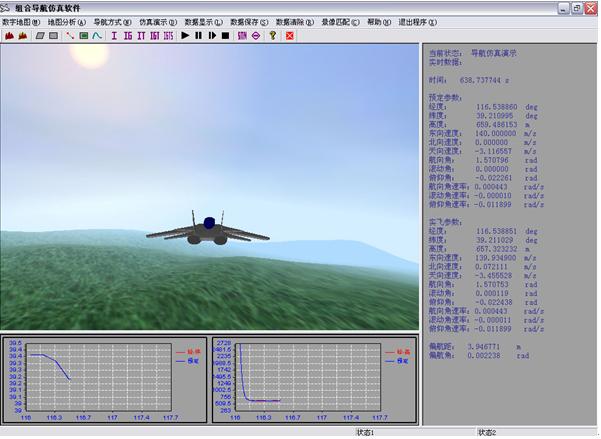
以惯性/卫星/地形匹配/景像匹配组合导航(四组合)系统的应用为背景研发了基于大圆航线的轨迹发生器,生成了包括INS/GPS组合段、INS/GPS/地形匹配组合段、INS/景像匹配组合段和机动飞行段等24段的飞行航线,在此基础上研发了多导航传感器信息融合与演示三维可视化仿真平台,该平台能根据作战任务和战区地形、敌方防御状况、飞行器约束条件、目标类型及所处环境等实现飞行器的突防及精确定位。
主要功能包括数字地图处理、地形的三维显示、地形匹配区域选择、航线规划、地形跟踪、组合导航系统设计以及惯性/卫星/地形匹配/景像匹配组合系统的三维实时显示与数据分析等。


