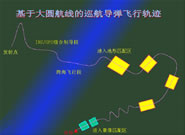
内容简介:在航空基础基金的资助下,在国内率先开展了四组合导航系统研究,建立了四组合导航系统的总体框架,实现了传感器层的信息融合、子系统层的信息融合和系统层的信息融合。完成了动、静基座的初始对准和机动航向辨识技术的研究;开展了景像匹算法研究,建立了景像匹配完整体系;开发了典型的陆基巡航导弹组合导航/制导仿真演示系统,包括基于大圆航线的轨迹发生器、INS/GPS组合段、INS/GPS/地形匹配组合段和INS/景像匹配组合段等24段,全程1337公里,飞行1小时17分34秒,在景像匹配对INS修正后,经15秒纯INS飞行后的命中精度为6-10米。获得了“国际先进,国内领先”水平的项目验收评价。


